描述
The BNO080 / 085 is a 9-axis system-in-package (SiP) for rapid development of sensor-enabled augmented reality (AR), virtual reality (VR), robotics and IoT devices. it features high-performance accelerometers, magnetometers and gyroscopes in a low-power 32-bit ARM M0 + MCU in a small package. Hillcrest's Freespace sensor hub software is pre-integrated on the BNO080 / 085 to provide superior 9-axis and 6-axis motion tracking.
The BNO080 / 085 offers application-specific configuration, functionality and performance in a small turnkey assembly that advantages by reducing time-to-market, development time and costs, as well as providing the highest level of accuracy and quality.
The VR IMU uses the impressive BNO080 IMU. this IC features a 3-axis accelerometer/gyroscope/magnetometer combination running with the ARM M0 + running powerful algorithms. The BNO080 Inertial Measurement Unit (IMU) generates accurate rotation vector headings, Perfect for VR and other heading applications, with static rotation errors of 2 degrees or less. This is what we've been waiting for: all sensor data combined and drift-corrected into meaningful, accurate IMU information.
The IC is designed to be implemented in an Android-based phone to handle all the calculations needed for virtual reality goggles using only your phone. The sensor functionality is very powerful and the power is complex. An I2C based library is provided which provides rotation vectors (which most people want to read from the IMU) as well as acceleration, gyroscope and magnetometer readings, step count, activity classifier (e.g. cycling) and calibration.
VR IMU has created a demo processing application to see how IMU's motion can accurately manipulate 3D objects using IMU's quaternion output.
If I2C is not your first communication choice, the sensor is also capable of communica via SPI and UART! If you are using a UART, we recommend that you use Serial Basic for easy connection.
This version uses an on-board 32 kHz crystal for increased precision and more accurate timestamps.
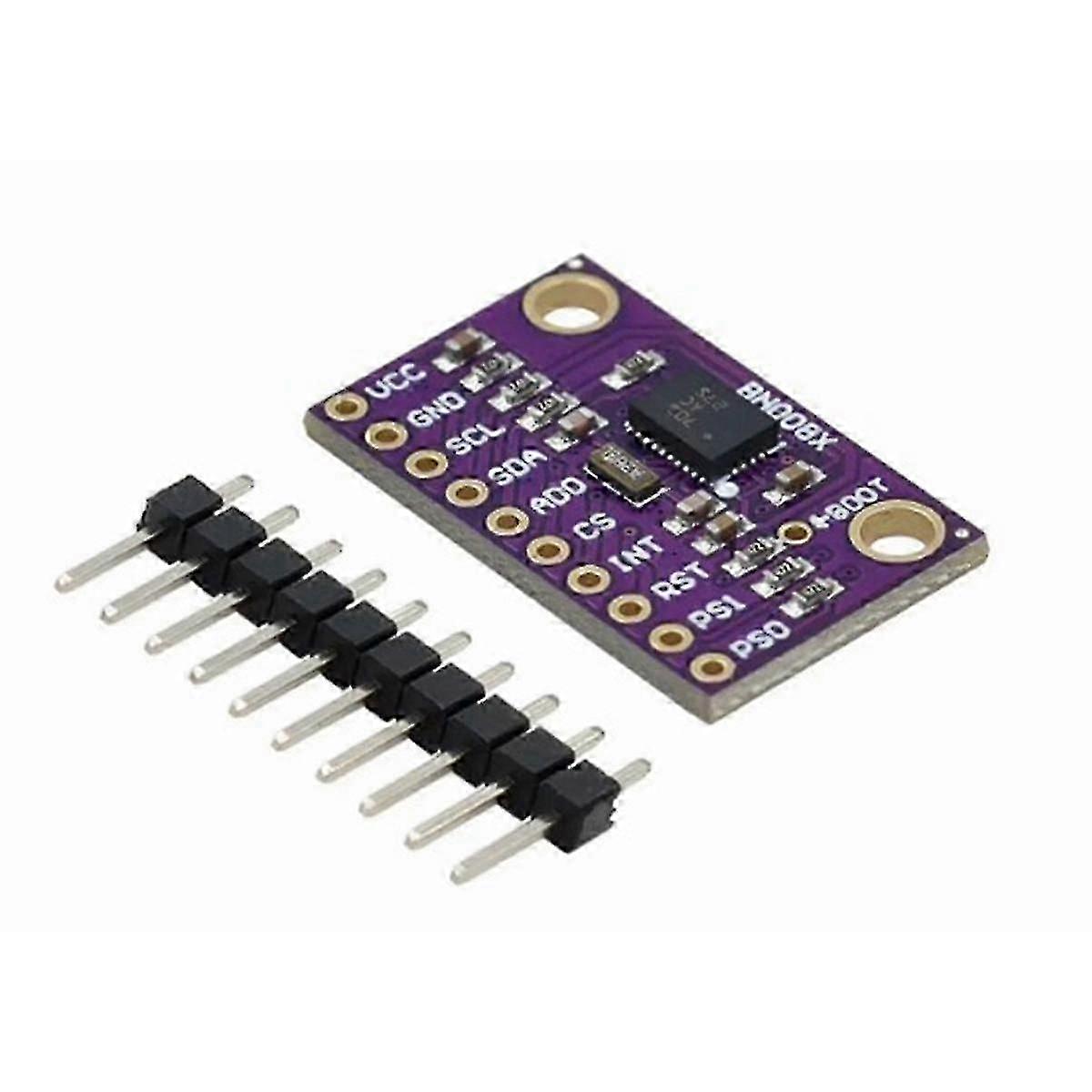
Interfaces:
The BNO080 can communicate through a of interfaces. The Qwiic VR IMU has two that allows the user to select their interface of choice.
I2C (Default): Up to 400kHz
SPI: Up to 3MHz
UART: 3Mbps
UART-RVC (Robot Vacuum Cleaners): 115200kbps
Performance Characteristics:
Rotation Vector
Dynamic Error: 3.5
Static Error: 2.0
Gaming Rotation Vector
Dynamic Error: 2.5
Static Error: 1.5
Heading Drift: 0.5 / min
Geomagnetic Rotation Vector
Dynamic Rotation Error: 4.5
Static Rotation Error: 3.0
Gravity Angle Error: 1.5
Linear Acceleration Accuracy: 0.35m/s2
Accelerometer Accuracy: 0./s2
Gyroscope Accuracy: 3.1 / sec
Magnetometer Accuracy: 1.4T
Colour:purple+black
Material:PCB
Package Contents:
1 set x Sensor Module
Only the above package content, other products are not included.
Note: Light reflection and different displays may cause the color of the item in the picture a little different from the real thing. The measurement allowed error is +/- 1-3cm.
-
Fruugo ID:
364901009-790919011
-
EAN:
686707653598