描述
AI Robot Tank Kit with SLAM Lidar Mapping, Python ROS Integration for Autonomous Navigation
Robust, programmable crawler platform designed for realworld robotics development and remote operation
Key benefits
Durable, lightweight chassis for versatile deployment: Crafted from green aluminum alloy oxide, the tracked crawler offers a stable base for indoor and light outdoor use while staying corrosion resistant and easy to handle.
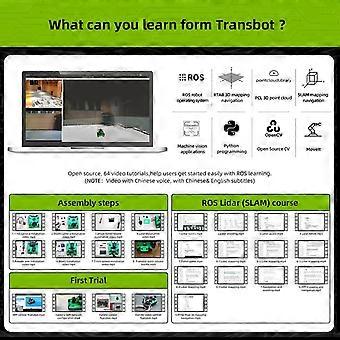
Accurate mapping and perception: SLAM lidar combined with HD and depth cameras provides reliable environment mapping, obstacle detection, and depth sensing for autonomous navigation and inspection tasks.
Strong actuation and expandability: torque gear motors deliver smooth, controllable motion on varied surfaces, and a powerful robot expansion board supports additional sensors, actuators, and custom peripherals.
Ready for development and simulation: Full Python and ROS integration with Rviz, Movelt, and Qt toolboxes enables robotic arm control, realworld simulation, and seamless migration from simulation to hardware.
Flexible control options: Operate the robot from a mobile app, use handle control for firstperson view operation, or program it remotely through JupyterLab for development and testing.
How it solves common problems
Speeds up prototyping by combining a rugged hardware platform with widely used software tools, so you can focus on algorithms and applications instead of basic integration.
Reduces mapping and navigation uncertainty through SLAM lidar and depth sensing, enabling safer autonomous operation in cluttered or dynamic environments.
Simplifies multiuser workflows through crossplatform control: supervisors can monitor via app while developers iterate in JupyterLab and ROS toolchains.
Practical applications
Robotics research and education: Use the platform to teach SLAM, perception, motion control, and robotic arm manipulation in labs and classrooms.
Remote inspection and monitoring: Deploy for visual and depthbased inspection of facilities, equipment, or confined indoor spaces with live FPV and mobile app control.
Algorithm development and field testing: Validate autonomous navigation and manipulation routines in real environments and transfer controllers developed in simulation to the hardware platform.
Technical highlights
Chassis material: Green aluminum alloy oxide for strength and reduced weight
Mobility: Tracked crawler design for stable traversal and low ground pressure
Sensors: SLAM lidar, HD camera, depth camera for combined mapping and perception
Actuation: torque gear motors for reliable movement and precise control
Expansion: Powerful robot expansion board for peripherals and custom modules
Software and compatibility: Python and ROS integration; supports Rviz, Movelt, and Qt toolboxes for arm control and simulation
Control interfaces: Mobile app control, handle control for FPV operation, and JupyterLab online programming for remote development
What sets this platform apart
An integrated balance of robust hardware and professional software toolchains tailored for development, simulation, and realworld deployment.
Multiple control pathways to match different workflows, from handson FPV operation to cloud or notebook based development.
Designed to support both perception driven autonomy and robotic arm control in a single, expandable package.
If you need a dependable, developmentready crawler that combines mapping, perception, and flexible control options for research, inspection, or prototype testing, this platform provides the core hardware and software integration to get projects running quickly.
-
Fruugo ID:
460142349-968526517
-
EAN:
6119562074153