描述
AI Robot Tank with Lidar, Autonomous SLAM Navigation, HD Depth Vision, Python ROS Programming
A durable, adaptable robot tank platform designed for development, research, inspection, and remote operation. Built with green anodized aluminum alloy oxide, the crawler chassis combines rugged construction with a low profile for stable movement and flexible payload mounting.
Key benefits
Robust mobility for uneven terrain: Tracked crawler design plus torque gear motors deliver steady traction and accurate positioning for indoor and outdoor tasks.
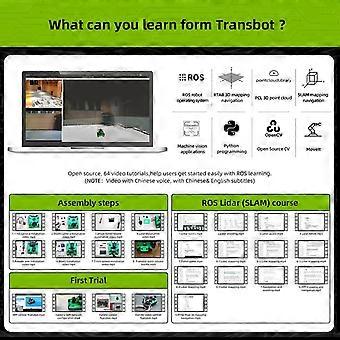
Ready for autonomous navigation and mapping: Integrated SLAM lidar enables realtime mapping and obstacle avoidance to simplify autonomous missions.
Rich sensing for perception and depth: HD and depth cameras provide visual and range data for navigation, scene understanding, and computer vision experiments.
Expandable control and I O: Yaboom robot expansion board centralizes power and I O for sensors, motors, and manipulators, reducing integration time.
Flexible software workflow: Native support for Python and ROS with Rviz, MoveIt, and Qt toolboxes for robotic arm control and realistic simulation, speeding development from simulation to field testing.
Multiple control modes: Operate via mobile app for field convenience, use a handle controller for first person view operation, or program online with JupyterLab for advanced development.
Technical highlights
Chassis material: Green anodized aluminum alloy oxide for a balance of durability and weight.
Mobility: Crawler tank tracks driven by torque gear motors for stable, controllable movement.
Sensing: SLAM lidar for mapping and localization, HD camera for visual streams, depth camera for 3D perception.
Core electronics: Yaboom robot expansion board for motor drivers, sensor interfaces, and expansion ports.
Software compatibility: Python and ROS integration with Rviz, MoveIt, and Qt toolboxes. Supports JupyterLab online programming for interactive development.
Control options: Mobile app control, handle control for FPV operation, and full programmatic access.
Practical use scenarios
Autonomous mapping and inspection: Deploy the crawler to map warehouses or large indoor facilities using SLAM lidar while HD and depth cameras capture visual and 3D data for inventory checks or route planning.
Manipulation and research: Attach a robotic arm and use ROS, Rviz, and MoveIt for motion planning and simulation, then validate pick and place workflows on the physical platform.
Remote field observation and FPV operation: Use the handle controller and mobile app for live first person view control during outdoor inspections, search tasks, or prototype demonstrations.
Why this product solves real problems
Reduces integration time by combining a ready chassis, sensor suite, and expansion board to create a turnkey development platform.
Supports both visual and depth perception for robust autonomy in cluttered environments.
Offers multiple control and programming interfaces to match the needs of researchers, educators, and developers, enabling fast iteration from simulation to deployment.
Compatibility and developer notes
Designed for Python and ROS based development workflows.
Works with Rviz, MoveIt, and Qt toolboxes for visualization, motion planning, and interface design.
Supports JupyterLab for interactive coding and testing.
This robot tank platform is intended for users who need a reliable, sensorrich mobile base for autonomous navigation, manipulation experiments, remote inspection, and rapid prototyping.
-
Fruugo ID:
462142193-972783564
-
EAN:
6274504673099