描述
AI Robot Tank with SLAM Lidar HD Vision ROS Python Programmable Tracked Crawler Platform
Robust crawler platform built for development and field use
This crawlerstyle robot combines a durable green aluminum alloy oxide chassis with performance sensing and control hardware to accelerate robotics development, testing, and deployment.
Key benefits
Durable and lightweight structure: Green aluminum alloy oxide construction offers corrosion resistance and a sleek, serviceable chassis that supports longterm testing and mounting of additional modules.
Accurate navigation and mapping: Integrated SLAM lidar delivers precise localization and mapping for autonomous navigation in indoor and structured outdoor environments.
Rich perception: HD and depth cameras provide resolution imagery and depth sensing for obstacle avoidance, object detection, and environment modeling.
Strong mobility and payload capability: torque gear motors give stable, controllable motion on varied surfaces and when carrying sensors or manipulators.
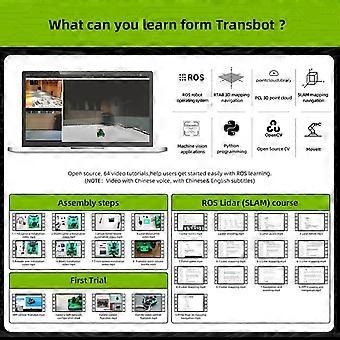
Flexible development and simulation: Full Python and ROS support with Rviz, MoveIt, and Qt toolboxes enables realworld simulation, robotic arm control, and rapid algorithm iteration.
Multiple control options: Control the robot from a mobile app, a handheld controller for FPV operation, or via JupyterLab for online programming and data analysis.
Expandable electronics: Comes with a powerful robot expansion board to connect sensors, actuators, and custom peripherals for prototyping and integration.
Functional highlights and compatibility
Software: Compatible with ROS and standard toolboxes such as Rviz and MoveIt for visualization, planning, and manipulation. Qt toolboxes enable GUI development and human machine interfaces.
Programming: Native Python support and JupyterLab access speed up development, debugging, and datadriven experiments.
Sensing and actuation: SLAM lidar for mapping, HD plus depth cameras for perception, and torque gear motors for reliable tracked locomotion.
Hardware expansion: Robot expansion board supports additional sensors, motors, and communication modules for custom projects.
Practical applications
Research and education: Teach and evaluate SLAM, perception, and manipulation workflows. Use Rviz and MoveIt for classroom demonstrations and student projects.
Inspection and mapping: Perform indoor facility mapping, corridor inspection, and asset surveys where stable tracked mobility and precise mapping are required.
Prototyping and robotics development: Rapidly prototype autonomy stacks, teleoperation setups, and custom sensor integrations using Python, ROS, and JupyterLab workflows.
What makes it stand out
Integrated combination of SLAM lidar, depth sensing, robust motors, and an expandable control board lets teams move from concept to field trials without piecing together separate subsystems.
Multiway control and full softwarestack compatibility reduce development friction and shorten iteration cycles for both research and applied projects.
Specifications summary
Chassis material: Green aluminum alloy oxide
Key sensors: SLAM lidar, HD camera, depth camera
Actuation: torque gear motors, tracked crawler design
Electronics: Powerful robot expansion board for peripherals
Software and tools: Python, ROS, Rviz, MoveIt, Qt, JupyterLab
Control methods: Mobile app, handheld controller for FPV, online programming in JupyterLab
Delivering a practical, expandable platform for navigation, perception, and manipulation development, this crawler robot is suited for teams that need a durable hardware base with full software integration for both simulation and realworld testing.
-
Fruugo ID:
464709603-977260207
-
EAN:
6119562007175