描述
Robotics Development Platform with SLAM Lidar, HD Camera, Python ROS, Crawler Chassis Mobility
Robust crawler robot platform designed for development, research, and field operation. Built from green aluminum alloy oxide for a lowprofile, durable chassis that is easy to and mount with additional sensors or manipulators.
Key benefits
Reliable mobility for uneven terrain: Crawler chassis plus torque gear motors provide stable traction and controlled movement for indoor and light outdoor tasks.
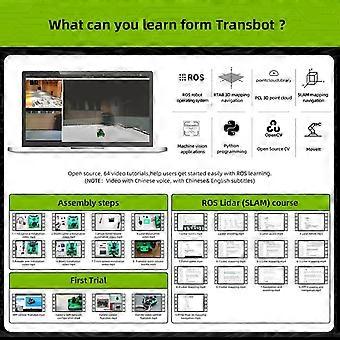
Precise perception and mapping: Integrated SLAM lidar with HD and depth cameras enables realtime mapping, obstacle detection, and depthaware vision for autonomous navigation.
Ready for development and simulation: Native Python and ROS integration lets engineers and educators develop, test, and visualize workflows using Rviz, Movelt, and Qt toolboxes for robotic arm control and realworld simulation.
Flexible control options: Operate the platform through a mobile app, a physical handle controller for firstperson view operation, or directly program in JupyterLab for remote development and data analysis.
Expandable and performance hardware: Includes a powerful robot expansion board and interfaces for additional modules, enabling custom sensors, manipulators, or compute modules to be added without major redesign.
Features and specifications
Material and build: Green aluminum alloy oxide chassis for a balance of strength, weight, and aesthetic consistency.
Sensors: SLAM lidar plus HD and depth cameras for mapping, localization, and visionbased tasks.
Actuation: torque gear motors designed for crawler drive configurations to handle varied surfaces with controlled speed and torque.
Electronics: Onboard robot expansion board providing processing, I O, and expansion ports for peripherals and peripherals integration.
Software compatibility: Supports Python and ROS toolchains and integrates with Rviz, Movelt, and Qt toolboxes to enable simulation, motion planning, and GUI development.
Control methods: Mobile app control, handlebased FPV control, and JupyterLab online programming interface for direct code execution and data collection.
How this product solves common problems
Speeds development and testing by combining readymounted sensors and a compatible ROS stack, avoiding lengthy hardware setup.
Reduces integration time with a standard expansion board and clear compatibility with common robotics toolboxes.
Provides multiple control pathways so teams can choose rapid teleoperation, scripted autonomy, or interactive programming based on project needs.
Typical use scenarios
Autonomous mapping and inspection: Use SLAM lidar and depth cameras to create detailed indoor maps, inspect infrastructure, and log navigation data for post analysis.
Robotics education and prototyping: Classroom and lab projects can leverage ROS, Rviz, Movelt, and Python examples to teach perception, planning, and manipulation workflows.
Remote teleoperation and FPV tasks: Mobile app and handle control allow operators to pilot the robot for exploration, site surveys, or media capture while monitoring HD and depth feeds.
Who should consider this platform
Robotics researchers and developers needing a modular, sensorrich mobile base.
Educators and students seeking a handson ROS compatible platform for teaching perception and motion planning.
System integrators prototyping autonomous or teleoperated solutions that require a configurable chassis with robust sensing and multiple control options.
What sets it apart
Integrated SLAMcapable sensors combined with ROS toolbox compatibility for faster transition from simulation to realworld testing.
A durable aluminum alloy oxide crawler chassis paired with torque motors for dependable mobility.
Multiple control and programming interfaces that support both novice testing and advanced research workflows.
Includes a flexible hardware and software foundation for , rapid prototyping, and practical deployment in development, education, and field operation contexts.
-
Fruugo ID:
466075785-979224256
-
EAN:
6119562006635